İntegral hesaplama
0 < b − a < 2π olmak üzere, r(θ) eğrisinin [a, b] kapalı aralığında kalan kısmının altında kalan alanı bulmak için, öncelikle eğri bir Riemann toplamı olarak tanımlanır.
* İlk olarak, [a, b] aralığı n kadar alt aralığa bölünür (burada n, isteğe bağlı seçilmiş pozitif bir tam sayıdır). Böylece, her alt aralığın uzunluğunu temsil eden Δθ, aralığın tüm uzunluğunun (b − a) alt aralık sayısına (n) bölümüne eşit olur.
* Her i = 1, 2, , n alt aralığı için θi'nin alt aralığın orta noktası olduğu kabul edilir ve merkezi kutupta, yarıçapı r(θi) ve merkezî açısı Δθ olan birer sektör çizilir.
* Buna göre, çizilmiş her sektörün alanı şu denklemle verilebilir:
Dolayısıyla, tüm sektörlerin toplam alanı da altta sunulan denklemle tanımlanır:
n alt aralıklarının sayısı ne kadar artarsa, söz konusu alanın ölçümü de gerçek alana o kadar çok yaklaşır. Böylece, [a, b] aralığındaki r(θ) eğrisinin altında kalan alan söyle tanımlanabilir:
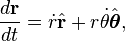
Bu ifade, aşağıdaki integralin Riemann toplamıdır:
Silindirik koordinat sistemi, düzlemden ayrı duran bir noktanın düzleme olan yüksekliğini ölçebilecek üçüncü bir koordinatı iki boyutlu kutupsal koordinat sistemine ekleyerek elde edilir. Bu, kartezyen koordinat sistemini üç boyuta genişletmek için kullanılana benzer bir yöntemdir. İki boyutlu kutupsal koordinat düzlemine dik duran ve kutup noktasından geçen üçüncü koordinat, genellikle hile gösterilir dikdüzlemine Üçüncü koordinat genelde h ile gösterilir. Buna göre de üç silindirik koordinat, (r, θ, h) yazımı ile ifade edilir.
Silindirik koordinatların Kartezyen koordinatlara dönüşümü şu şekilde olur:
Robot bilimi
Hareket edebilen çoğu robot, seyir için kutupsal koordinat sistemini ya da onun biraz değiştirilmiş hâlini kullanır. Bu yapay zekâ için çok uygundur çünkü koordinat sisteminin merkezini (kutbunu) daima robotun o andaki konumu oluşturur. Dolayısıyla, robotun herhangi bir zamanda koordinat sisteminin neresinde olduğunu hesaplamasına gerek yoktur: tek gereken, hangi yönde ve ne kadar uzağa gideceğini belirlemesidir. Eğer robotlar kartezyen koordinat sistemini kulanarak yol alsalardı, hareket için gerekli uzaklık ve açı hesaplamaları için cebir ve trigonometri kullanmak gerekirdi. Oysa, kutupsal koordinat sistemindeki bir açı ile ifade edilen yön ile katedilmesi gereken uzaklık bilgisi, robotun tam istenen yere gitmesini sağlamak için yeterlidir.
Havacılık
Havalanan uçaklar, seyir için kutupsal koordinat sisteminin biraz değiştirilmiş bir çeşidini kullanırlar. Bu sistemde, genellikle "yön 360" (heading 360) olarak adlandırılan 0° ışını dikeydir ve açılar saatin tersi yönde değil, saat yönünde devam eder. Yön 360 manyetik kuzeye denk gelirken, 90, 180 ve 270 yönleri de sırasıyla manyetik doğu, güney ve batıya denk gelir. Dolayısıyla, örneğin doğuya doğru 5 deniz mili kadar yol alacak bir uçak, yön 90 üzerinde 5 birim katedecek demektir.
Arşimet spirali
Temelde iki Arşimet spiralinden oluşan sarmal kompresörün çalışma ilkesi.
Arşimet spiralinin gerçek dünyada pek çok uygulaması vardır.
Örneğin, Arşimet spirali şekilli ve birbirinin içine geçmiş aynı büyüklükteki iki sarmal, sıvı ya da gaz gibi akışkanları pompalamak ya da sıkıştırmak için kullanılan sarmal kompresörlerin temelini oluşturur. Sarmallardan biri sabit dururken, diğeri kendi çevresinde dönmemek üzere merkez dışı (eksantrik) bir dönüş hareketi yapar ve akışkanı iki sarmalın duvarları arasında sıkıştırarak ilerletir.
Gramofon plakların çok erken dönemlerinde, plak üzerindeki oluklar bir Arşimet spirali oluşturacak şekilde açılır ve bu şekilde, olukların birbirlerinden eş uzaklıkta durmaları sağlanarak, bir plağın üstüne en çok miktarda müzik kaydedilmeye çalışılırdı. Ancak sonraları, daha iyi ses kalitesi elde edebilmek için bu uygulamadan vazgeçilmiştir.
Kutupsal koordinatlar, Kepler'in gezegensel hareket kanunları için doğal bir ifade yöntemi sağlar.
Kepler'in birinci kanununa göre, bir yıldız çevresindeki bir gezegenin yörüngesi, bir odağı sistemin kütle merkezinde oturan bir elipstir. Bu elipsi ifade etmek için, yukarıdaki "Konik kesitler" bölümünde verilmiş olan denklem kullanılabilir.
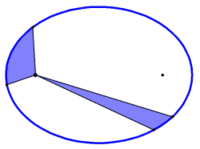
Kepler'in ikinci kanunu olan "eşit alanlar kanunu" ise şunu söyler:
"bir gezegen ile onun yıldızını birleştiren bir doğru, eşit zaman aralıklarında birbirine eşit alanlar tarar";
yani,
sabittir. Bu denklemler Newton'un hareket kanunlarından elde edilebilir ve kutupsal koordinatların kullanıldığı tam bir türetme, Kepler'in gezegensel hareket yasaları maddesinde sunulmuştur.